je recherche une aide pour la conception d'un système mécanique.
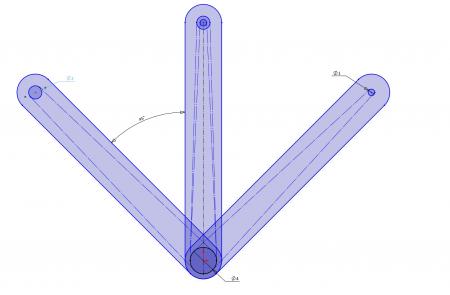
conceptuellement, j'ai un bras fixé à une extrémité sur un dispositif qui oscille de 45 degrés vers la gauche et de 45 degrés vers la droite à partir de sa position verticale. A l'autre extrémité de ce bras, j'ai un axe. Je voudrais que lorsque le bras passe de sa position gauche à sa position droite, soit environ 90 degrés, l'axe fasse une rotation de 180 degrés et lorsqu'il passe de la droite vers la position gauche soit toujours 90 degrés, l'axe fasse ce coup-ci une rotation de 360 degrés.
je recherche une solution mécanique sans mettre un moteur sur l'axe.
si quelqu'un a une idée, je vous en serais reconnaissant.
Effectivement un petit schéma pourrait permettre de mieux appréhender ta problématique.
Mais si j'ai bien compris je proposerai ce concept: un bras avec un double jeux de courroie/ roue libre en jouant sur des diamètres de poulie pour faire varier l'angle de rotation de l'axe en bout de bras. - une roue libre qui entraine la courroie de gauche quand tu pivote à gauche, avec un rapport 2:1 entre les poulies pour amplifié ta rotation de 45° à 90° - une roue libre qui entraine la courroie de droite quand tu pivote à droite, avec un rapport 4:1 entre les poulies pour amplifier ta rotation de 45° à 360°
Prévoir les tendeurs de courroie qui vont bien. C'est 100% mécanique, sans actionneur, mais attention à l'encombrement, aux couples et aux vitesses!
Merci Icome pour aide très appréciée. Effectivement j'aurais du faire un schéma pour une meilleure compréhension.
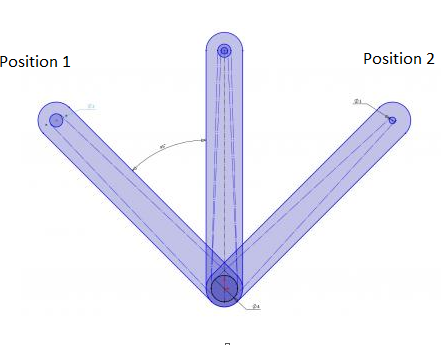
Sur la base de ton schéma (merci à toi), je cherche à faire faire 180 ° à l'axe au bout du bras lorsqu'on passe de la position 1 à la position 2 et 360° lorsqu'on passe de la position 2 à la position 1. Je pense qu'avec ton système de courroie/roue libre, cela doit fonctionner mais comment passer d'une courroie à l'autre selon que le bras passe de la position 1 à la 2 et vice-versa ?
Le rapport de transmission étant différent selon le sens de rotation du bras, il n'y a que la solution par poulies et courroies (ou chaines, ou engrenages si le glissement n'est pas admis) qui puisse convenir, associée à deux roues libres des poulies en liaison avec le bâti. La vidéo jointe illustre le principe du fonctionnement. Les poulies sont exagérément grossies, dans le but de mieux distinguer les mouvements. En fait, tout dépend des dimensions du mécanisme... Remarque importante: comme la poulie de sortie liée à l'axe est entraînée par le bras, les rapports de transmission ne sont pas de 2 et de 4, mais de 3 et de 5.